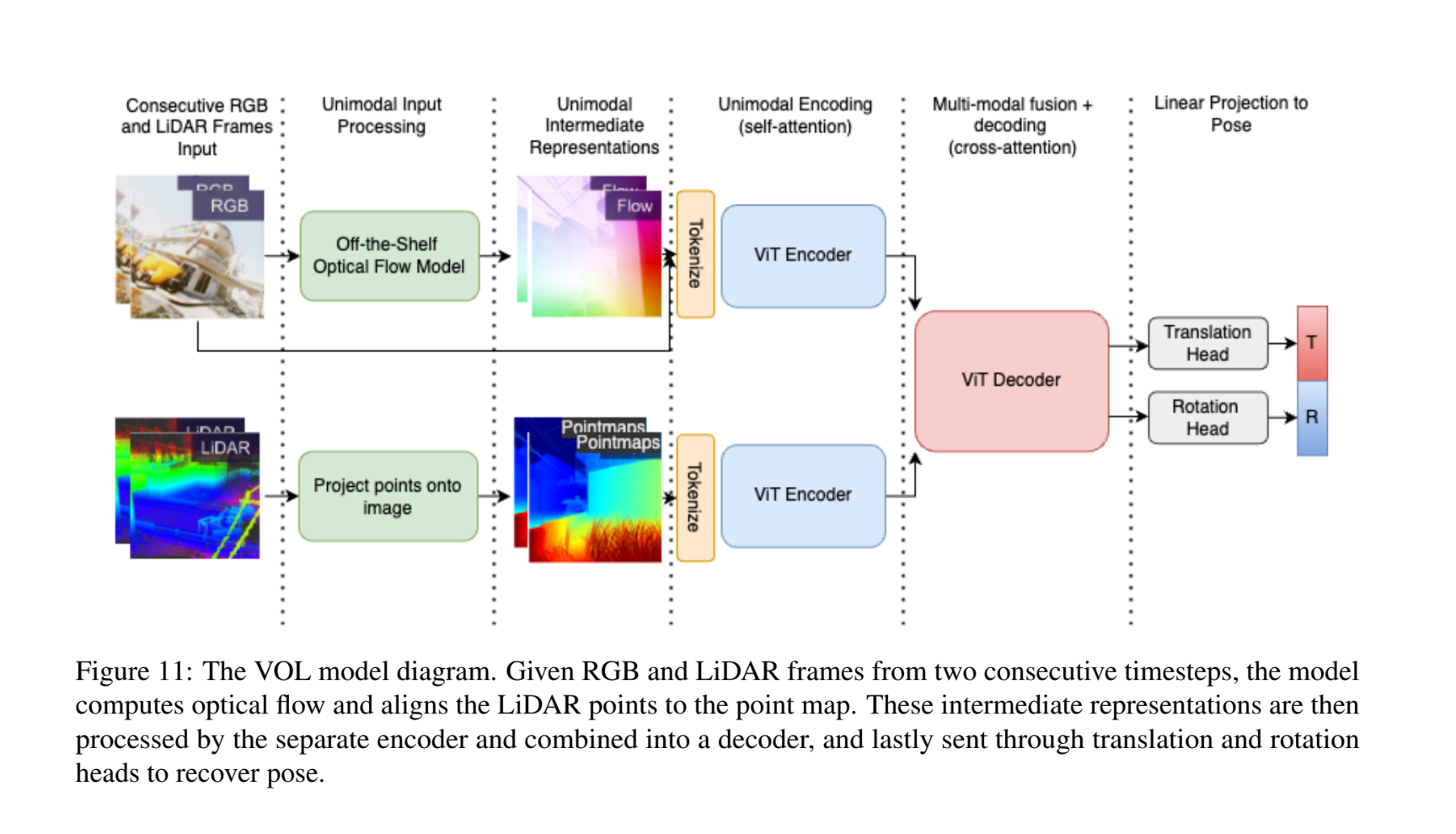
Multimodal Odometry: Visual + LiDAR
Sep — Nov 2024
An odometry model fusing vision and LiDAR for robust motion tracking, with improved accuracy on the KITTI and TartanAir datasets.
SLAMLiDARDeep Learning
An odometry model fusing vision and LiDAR for robust motion tracking, with improved accuracy on the KITTI and TartanAir datasets.

A 6-DOF arm playing Fruit Ninja with YOLOv8-based object tracking — 94% accuracy and a 0.6s reaction time.
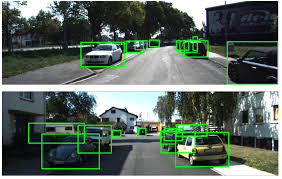
Monocular 3D object detection on KITTI using a fine-tuned YOLOv8 with optimized training for better accuracy.
A vision-based method to estimate root-canal drill volumes for clinical use at MAIDS, New Delhi.

A hybrid-controller solar tracker on a solar-powered vending cart, improving power capture by 25.1% over a static panel with 8+ hours of field runtime.

University UGVs for the Intelligent Ground Vehicle Competition — embedded, controls and perception stacks. 9th overall and 5th in the Cyber Security Challenge at IGVC 2019.
Find more details about my projects and experience in my résumé or on GitHub.