Experience
Research and applied work on perception and autonomy for embodied systems — including learning-based manipulation and continual adaptation of vision-language-action (VLA) models for deployment.
Built perception and autonomy systems for mobile robotic embodiments, taking models from prototype to on-robot deployment.

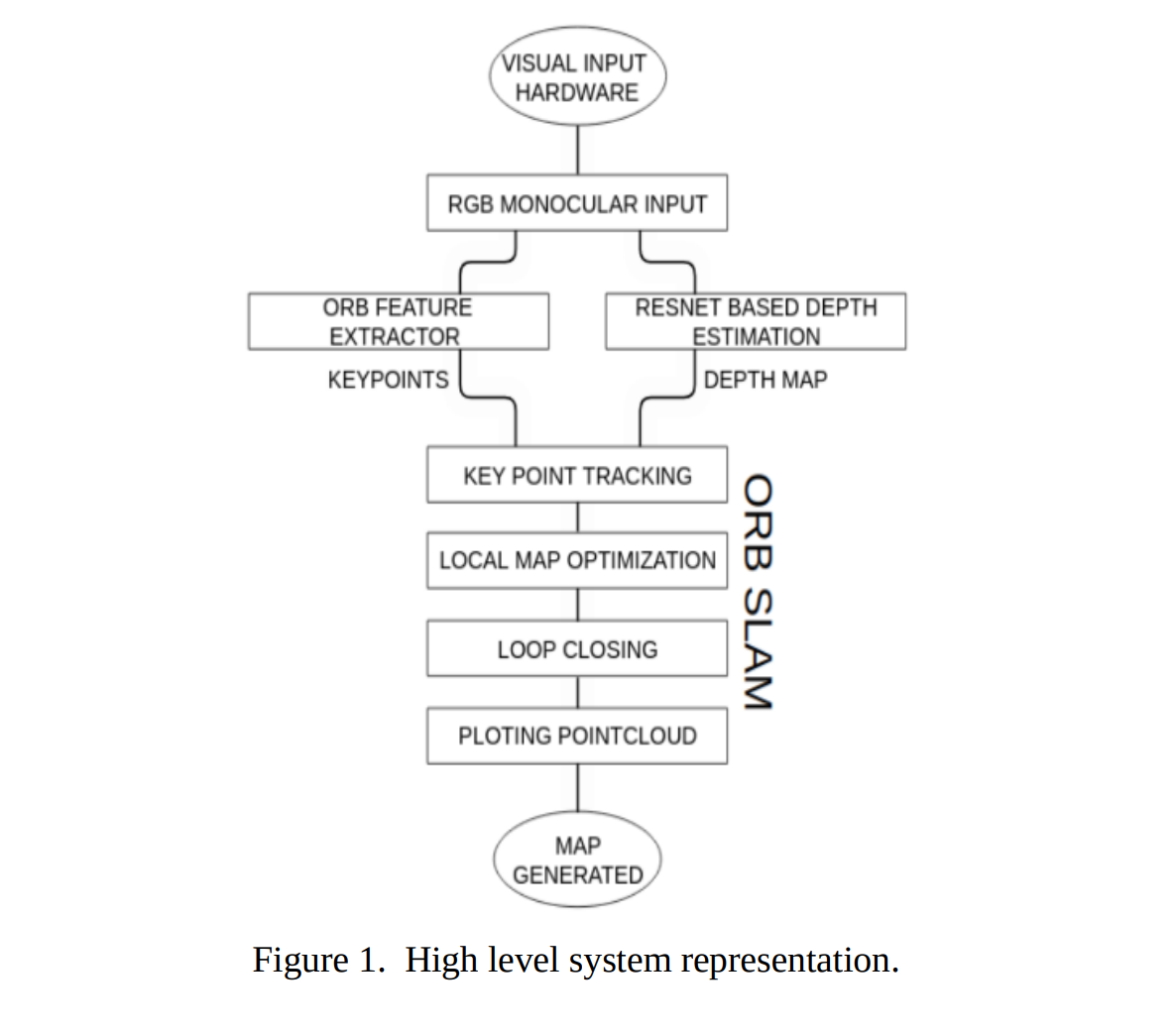
Worked on Visual-Inertial SLAM for the Pepper robot and integrated it with navigation APIs. Also supported students and researchers working with Kinova, Fetch and Misty robots.
Worked on adaptive actions with active perception for feedback in closed-loop manipulation. Implemented Koopman-operator rollouts for local recovery and a VLM for global planning, recovering from 8 failure states at ~73% average success.

Improved 3D CT-scan analysis of metal-ion batteries for non-destructive testing. Aligned cylindrical 2.5D cell scans with morphological operations, built a heuristic-search parameter auto-tuner, and ran CI/CD GitHub Actions cycles with CUDA for real-time, production-ready deployment.

Part of the founding team. Architected data-acquisition pipelines that enabled initial deployments and drove $200K+ in funding, and designed efficient compute allocation for client-server deployments optimized for real-time performance.

Led a solar-powered vending-cart solution to preserve farm produce for street vendors. Engineered a hybrid-controller dual-axis solar tracker (+25.1% power efficiency over static, >8 hr runtime) and presented to government officials, leading to a startup product roll-out.

Led the university's UGV robotics team across personnel and logistics, developing the UGVs Minotaur (2019) and Centaur (2020) — embedded, controls and perception. Secured 5th in the Cyber Security Challenge and 9th overall at IGVC 2019, Oakland University, Michigan.